

Replicating the exceptional tactile sensing skills of the human hand has to this point remained an elusive purpose within the discipline of robotics. However important progress has been made lately. One notably promising space of growth has been within the creation of GelSight sensors. These sensors make use of a mixture of sentimental elastomeric supplies and high-resolution imaging to detect and interpret floor textures and forces in a fashion much like human contact. The system consists of a rubbery materials coated with a reflective floor, making a deformable gel pad that acts as a delicate tactile interface.
When a GelSight sensor comes into contact with an object, the gel pad compresses and conforms to the item’s form and floor texture. The deformation of the gel is then captured utilizing high-resolution cameras, which document the adjustments within the reflective floor. These digital camera pictures are processed utilizing refined algorithms to extract detailed details about the item’s floor, akin to its texture, roughness, and even delicate adjustments in form.
These sensors do have their limitations, nonetheless, that make them unsuitable for some use circumstances. For instance, when the elastomer is uniformly deformed, or when it reaches its maximal level of deformation, it’ll produce inaccurate drive measurements. To get to a human-like degree of tactile sensing, enhancements to this platform are nonetheless wanted.
One such enchancment was not too long ago described by researchers from Queen Mary College in London. They’ve developed a light-weight and low value sensor based mostly on the GelSight design, however with some vital enhancements that permit it to supply extra correct drive measurements than current programs, even when the elastomer is stretched to its limits. Known as L3 F-TOUCH, these fingertip sensors produce high-resolution information and may transmit it to a processing unit wirelessly.
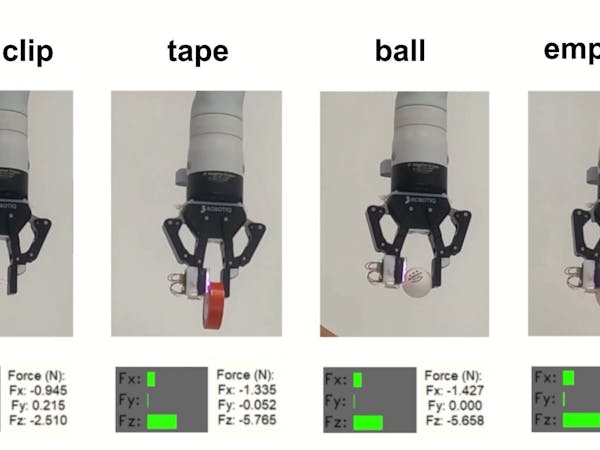
Moderately than instantly measuring floor deformations of the gel, L3 F-TOUCH as a substitute incorporates an built-in mechanical suspension construction with an ARTag hooked up to its base. Because the elastomer is displaced, this ARTag strikes and will be tracked by the digital camera. An algorithm can translate these actions into drive contacts alongside the x, y, and z axes of the floor of the sensor. This data is directed, by way of a mirror, to the identical digital camera that pictures the floor of the gel to detect tactile data. That setup retains the system light-weight and low value.
A collection of experiments confirmed that the L3 F-TOUCH sensor might certainly overcome the constraints of conventional GelSight sensors. The researchers additionally demonstrated that their system achieved larger ranges of measurement accuracy, and that the L3 F-TOUCH is extra sensible than current applied sciences.
One of many members of the analysis workforce famous that they “… will focus [their] future work on extending the sensor’s capabilities to measure not solely drive alongside the three main axes but in addition rotational forces akin to twist, which might be skilled throughout screw fastening whereas remaining correct and compact. These developments can allow the sense of contact for extra dynamic and agile robots in manipulation duties, even in human-robot interplay settings, like for affected person rehabilitation or bodily help of the aged.”
Future developments of the L3 F-TOUCH sensing system might allow the event of extra superior and human-like robots at some point.