
{kind=link}
Bipedal robotic walks with a single motor
— September fifth, 2023
A well-liked purpose amongst roboticists is animal-like locomotion. Animals transfer with a fluidity and style that could be very exhausting to duplicate artificially. That purpose has led to extraordinarily complicated robots that require a mess of motors and sensors, together with heavy processing, to stroll. However even these don’t fairly match organic motion. Taking a brand new strategy, engineers from Carnegie Mellon College and the College of Illinois Urbana-Champaign created a easy bipedal robotic named “Mugatu” that walks utilizing a single actuator.
This strategy is counter-intuitive, however fairly smart once we truly have a look at the gaits of actual animals. Bipedal animals, corresponding to people, don’t want to interact many muscle groups when strolling on flat surfaces. We obtain that effectivity with steadiness and physique geometry developed for this objective. In a way, a strolling human is at all times falling ahead barely and redirecting their inertia to take a step. This robotic walks in an identical method and solely wants a motor to maneuver one leg ahead relative to the opposite.
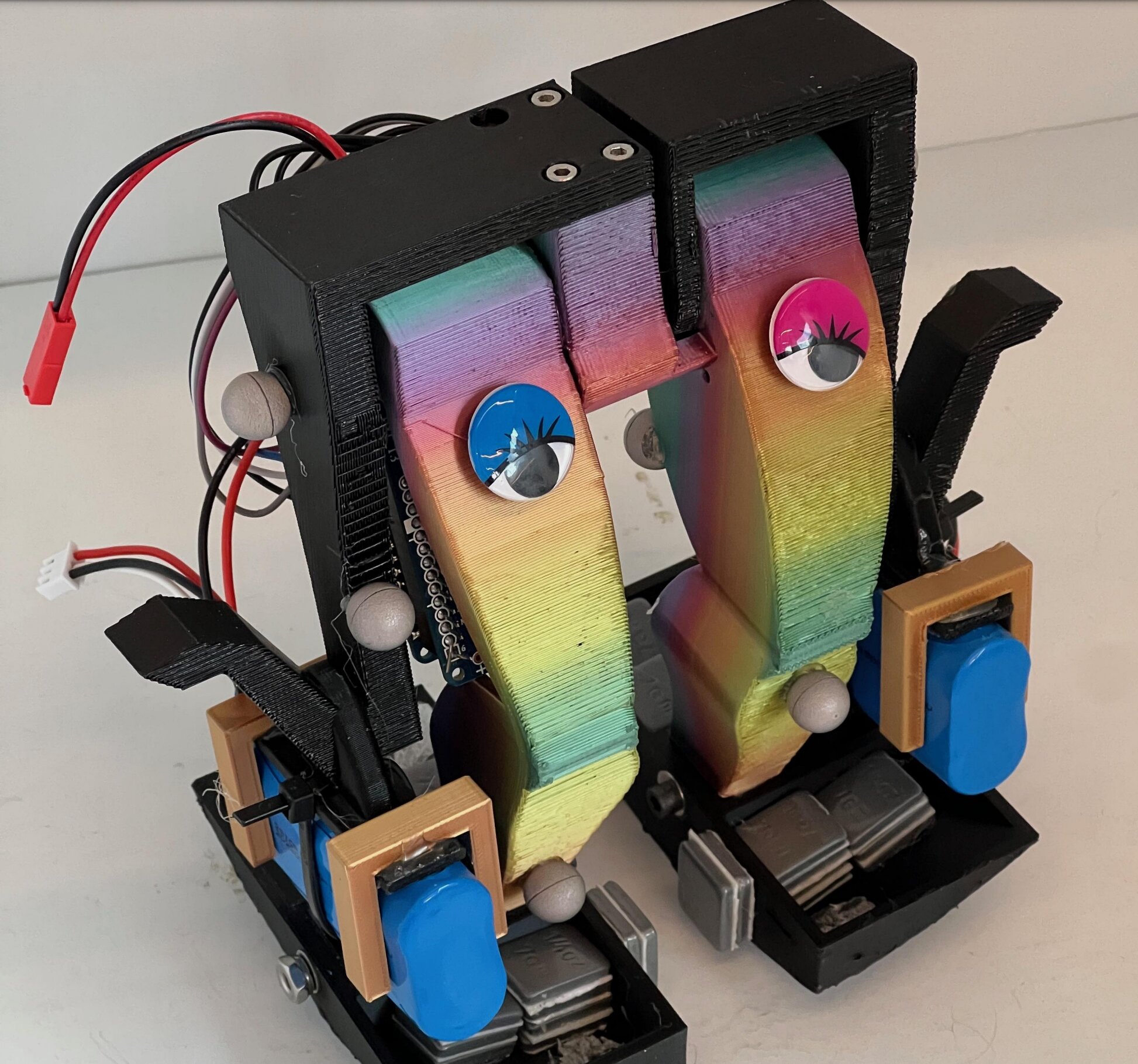
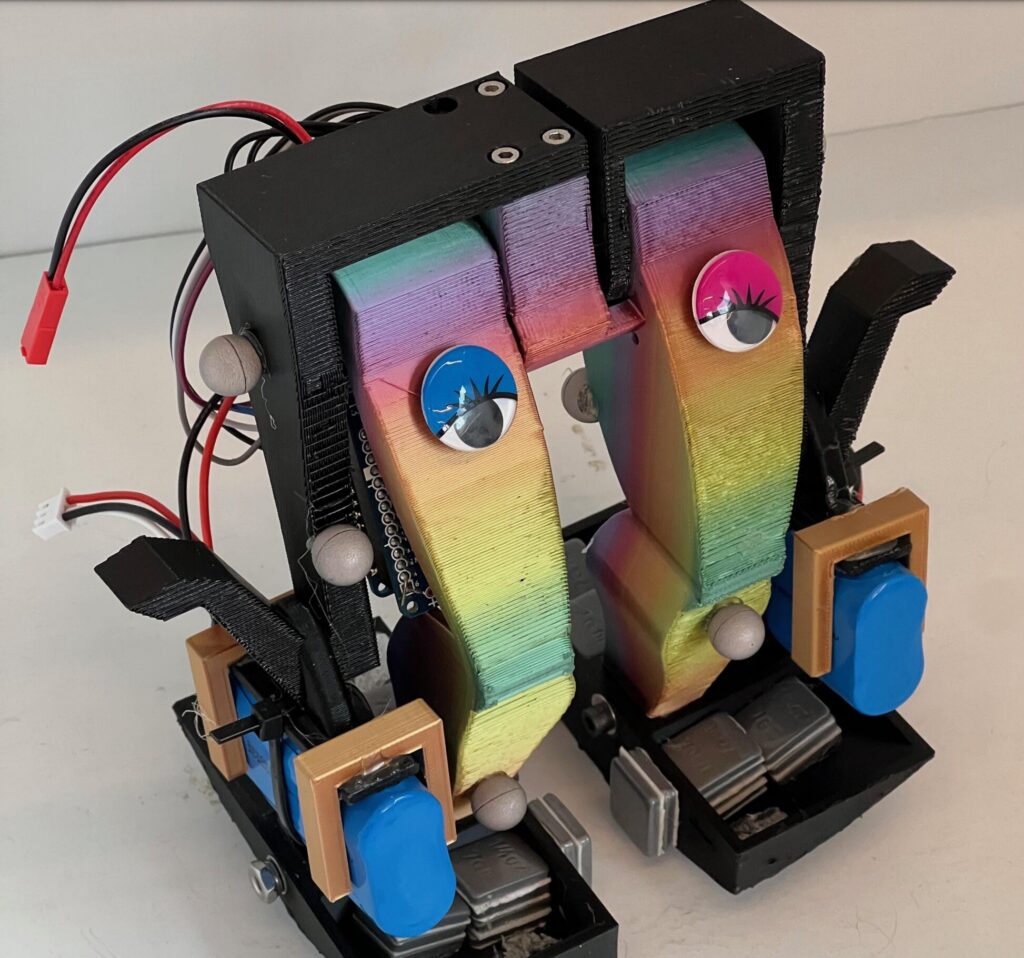
The group constructed Mugatu utilizing 3D-printed legs related by a servo “hip” joint. An Arduino MKR Zero board controls that motor, shifting it with the exact timing needed to realize the “steady falling” gait. This prototype doesn’t put it to use but, however there’s additionally an IMU within the left leg that might present helpful suggestions information sooner or later. For now, the robotic depends on pre-programmed actions.
Whereas the prototype Mugatu has little utility, the analysis may show to be indispensable for growing extra pure gaits with fewer actuators.
Picture credit score: J. Kyle et al.
You’ll be able to comply with any responses to this entry by way of the RSS 2.0 feed.
You’ll be able to depart a response, or trackback from your individual website.