

{kind=link}
It’s laborious to beat the power density of chemical fuels. Batteries are quiet and clear and straightforward to combine with electrically-powered robots, however they’re 20 to 50 occasions much less power dense than a chemical gas like methanol or butane. That is wonderful for many robots that may afford to only carry round a complete bunch of batteries, however as you begin robots which are insect-size or smaller, batteries merely don’t scale down very nicely. And it’s not simply the batteries—electrical actuators don’t scale down nicely both, particularly if you happen to’re in search of one thing that may generate plenty of energy.
In a paper printed 14 September within the journal Science, researchers from Cornell have tackled the small-scale actuation downside with what is actually a really tiny, very tender inside combustion engine. Methane vapor and oxygen are injected right into a tender combustion chamber, the place an itty-bitty lil spark ignites the combination. In half a millisecond, the highest of the chamber balloons upwards like a piston, producing forces of 9.5 newtons by means of a cycle that may repeat 100 occasions each second. Put two of those actuators collectively (driving two legs a chunk), and also you’ve acquired an exceptionally highly effective tender quadruped robotic.
Every of the 2 actuators powering this robotic weighs simply 325 milligrams and is a couple of quarter of the dimensions of a US penny. A part of the explanation that they are often so small is that many of the related parts are offboard, together with the gas itself, the system that mixes and delivers the gas, and {the electrical} supply for the spark generator. However even with out all of that stuff, the actuator has a bunch happening that allows it to function constantly at excessive cycle frequencies with out melting.
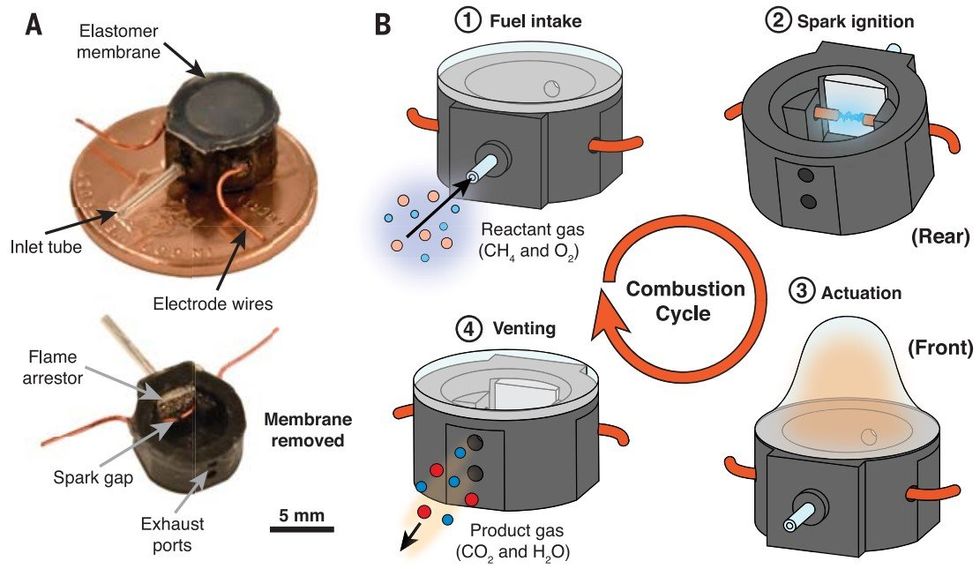 A view of the actuator and its part supplies together with a diagram of the combustion actuation cycle.Science Robotics
A view of the actuator and its part supplies together with a diagram of the combustion actuation cycle.Science Robotics
The largest difficulty could also be that this actuator has to deal with precise explosions, which means that cautious design is required to guarantee that it doesn’t torch itself each time it goes off. The small combustion quantity helps with this, as does the flame-resistant elastomer materials and the built-in flame arrestor. Regardless of the violence inherent to how this actuator works, it’s truly very sturdy, and the researchers estimate that it will possibly function constantly for greater than 750,000 cycles (8.5 hours at 50Hz) with none drop in efficiency.
“What’s fascinating is simply how highly effective small scale combustion is,” says Robert F. Shepherd, who runs the Natural Robotics Lab at Cornell. We lined a few of Shepherd’s work on combustion-powered robots practically a decade in the past, with this bizarre pink leaping factor at IROS 2014. However going small has each challenges, and advantages, Shepherd tells us. “We function within the decrease restrict of what volumes of gases are flamable. It’s an fascinating place for science, and the engineering outcomes are additionally helpful.”
The primary of these engineering outcomes is a little bit insect-scale quadrupedal robotic that makes use of two of those tender combustion actuators to energy a pair of legs every. The robotic is 29 millimeters lengthy and weighs simply 1.6 grams, however it will possibly leap a staggering 59 centimeters straight up and stroll whereas carrying 22 occasions its personal weight. For an insect-scale robotic, Shepherd says, that is “close to insect stage efficiency, leaping extraordinarily excessive, in a short time, and carrying giant masses.”
Cornell College
It’s a little bit bit laborious to see how the quadruped truly walks, for the reason that actuators transfer so quick. Every actuator controls one facet of the robotic, with one combustion chamber related to chambers at every foot with elastomer membranes—a bonus of this actuation system is that for the reason that energy supply is fuel strain, you’ll be able to implement that strain someplace in addition to the combustion chamber itself. Firing each actuators collectively strikes the robotic ahead, whereas firing one facet or the opposite can rotate the robotic, offering some directional management.
“It took plenty of care, iterations, and intelligence to give you this steerable, insect-scale robotic,” Shepherd informed us. “Does it should have legs? No. It could possibly be a speedy slug, or a flapping bee. The amplitudes and frequencies doable with this technique enable for all of those prospects. In truth, the true difficulty we have now is making issues transfer slowly.”
Getting these actuators to decelerate a bit is without doubt one of the issues that the researchers are subsequent. By buying and selling velocity for drive, the concept is to make robots that may stroll in addition to run and leap. And naturally discovering a solution to untether these methods is a pure subsequent step. Among the different stuff that they’re fascinated with is fairly wild, as Shepherd tells us: “one thought we need to discover sooner or later is utilizing aggregates of those small and highly effective actuators as giant, variable recruitment musculature in giant robots. Placing 1000’s of those actuators in bundles over a inflexible endoskeleton might enable for dexterous and quick land primarily based hybrid robots.” Personally, I’m having bother even picturing a robotic like that, however that’s what’s thrilling about it, proper? A big robotic with muscular tissues powered by 1000’s of tiny explosions—wow.
Highly effective, tender combustion actuators for insect-scale robots, by Cameron A. Aubin, Ronald H. Heisser, Ofek Peretz, Julia Timko, Jacqueline Lo, E. Farrell Helbling, Sadaf Sobhani, Amir D. Gat, and Robert F. Shepherd from Cornell, is printed in Science.