
{kind=link}
Can tripedal robots really stroll?
— July eleventh, 2023
Constructing strolling robots is troublesome, as a result of they both want lots of legs or some means to stability by means of their gait. There’s a purpose that the robots designed by firms like Boston Dynamics are so spectacular. However a lot of hobbyists have made bipedal and quadrupedal robots, whereas largely ignoring tripedal robots. To seek out out in the event that they might be sensible, James Bruton created a prototype tripedal robotic.
When in comparison with a bipedal robotic, a tripedal robotic is extra secure when standing nonetheless. However a bipedal robotic is extra secure when strolling. That’s as a result of it will probably preserve its heart of gravity nearly immediately above the foot that contacts the bottom. A tripedal robotic, alternatively, wants to aim to stability on two legs whereas transfer the third, whereas the middle of gravity is someplace above the center of a triangle fashioned by the three toes. That makes strolling gaits troublesome to attain.
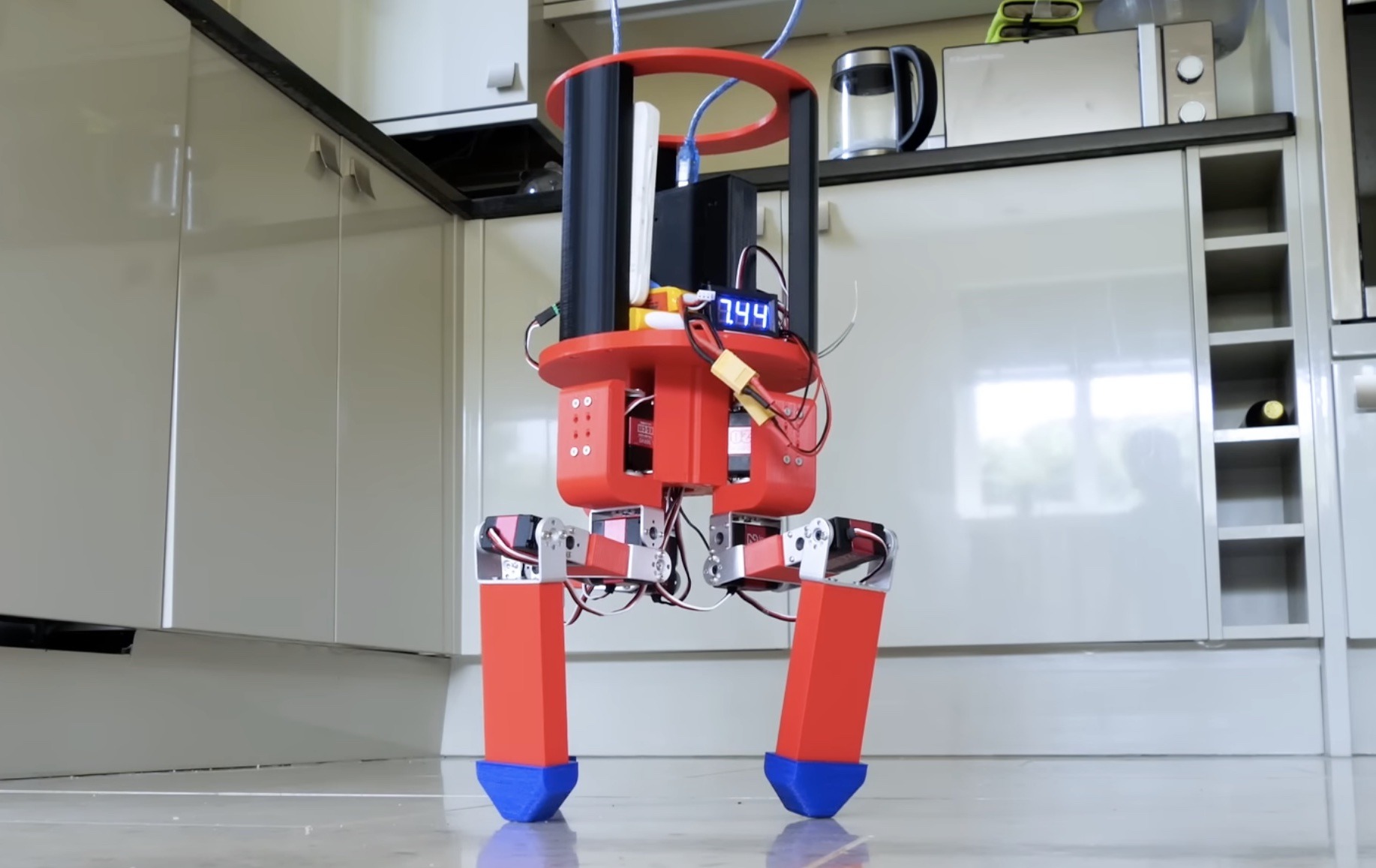
Bruton constructed this prototype utilizing a 3D-printed physique, legs actuated by servo motors, and an Arduino Mega 2560 for management. The three legs are organized with radial symmetry and every leg has three joints. Bruton tried to provide the robotic a gait by which it tries to momentarily stability on two legs, whereas lifting and swinging the third round.
However that was very inefficient and clumsy. Bruton believes that he may obtain higher outcomes by equipping the robotic with an IMU. That will give it a way of stability, which may assist it stay regular on two legs by means of a gait. With a counterbalancing weight, that would make an enormous distinction. However for now, Bruton is placing this experiment on the again burner.
You may comply with any responses to this entry by means of the RSS 2.0 feed.
You may depart a response, or trackback from your individual website.