
{kind=link}
The drone screams. It’s flying so quick that following it with my digital camera is hopeless, so I surrender and watch in disbelief. The shrieking whine from the 4 motors of the racing quadrotor Dopplers up and down because the drone twists, turns, and backflips its approach via the sq. plastic gates of the course at a velocity that’s actually superhuman. I’m cowering behind a security web, inside a hangar at an airfield simply outdoors of Zurich, together with the drone’s creators from the Robotics and Notion Group on the College of Zurich.
“I don’t even know what I simply watched,” says
Alex Vanover, because the drone involves a hovering halt after finishing the 75-meter course in 5.3 seconds. “That was lovely,” Thomas Bitmatta provides. “At some point, my dream is to have the ability to obtain that.” Vanover and Bitmatta are arguably the world’s finest drone-racing pilots, multiyear champions of extremely aggressive worldwide drone-racing circuits. And so they’re right here to show that human pilots haven’t been bested by robots. But.
AI Racing FPV Drone Full Ship! – College of Zurichyoutu.be
Evaluating these high-performance quadrotors to the form of drones that hobbyists use for pictures is like evaluating a jet fighter to a lightweight plane: Racing quadrotors are closely optimized for velocity and agility. A typical racing quadrotor can output 35 newton meters (26 pound-feet) of pressure, with 4 motors spinning tribladed propellers at 30,000 rpm. The drone weighs simply 870 grams, together with a 1,800-milliampere-hour battery that lasts a mere 2 minutes. This excessive power-to-weight ratio permits the drone to speed up at 4.5 gs, reaching 100 kilometers per hour in lower than a second.
The autonomous racing quadrotors have comparable specs, however the one we simply noticed fly doesn’t have a digital camera as a result of it doesn’t want one. As a substitute, the hangar has been outfitted with a 36-camera infrared monitoring system that may localize the drone inside millimeters, 400 occasions each second. By combining the placement information with a map of the course, an off-board laptop can steer the drone alongside an optimum trajectory, which might be troublesome, if not inconceivable, for even the most effective human pilot to match.
These autonomous drones are, in a way, dishonest. The human pilots have entry to the one view solely from a digital camera mounted on the drone, together with their data of the course and flying expertise. So, it’s actually no shock that US $400,000 value of sensors and computer systems can outperform a human pilot. However the motive why these skilled drone pilots got here to Zurich is to see how they might do in a contest that’s really honest.
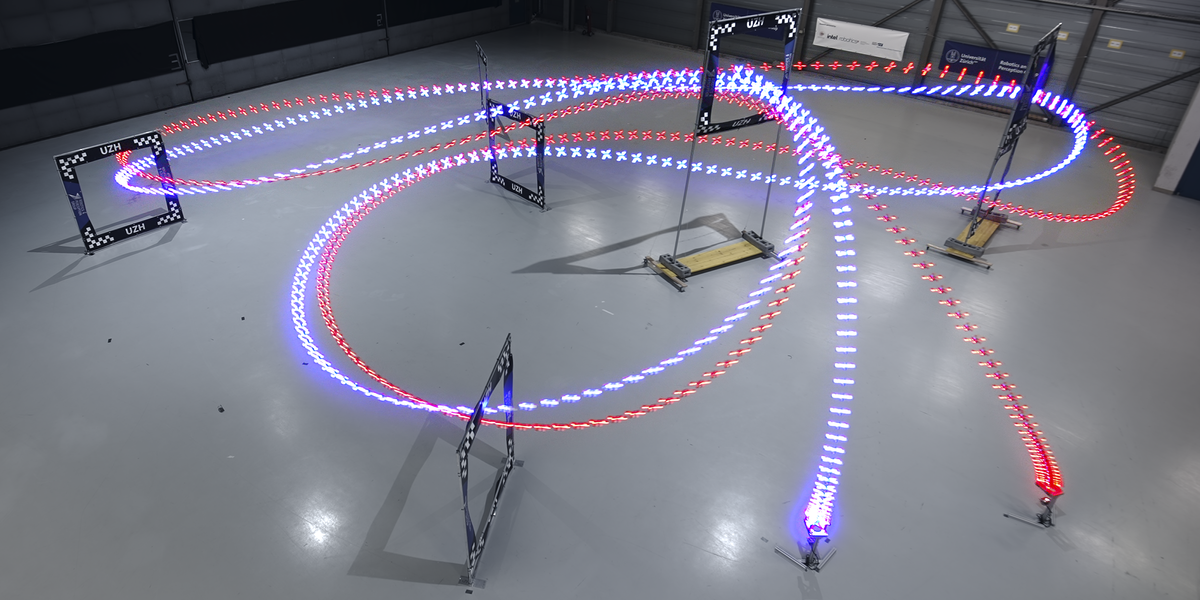
 A human-piloted racing drone [red] chases an autonomous vision-based drone [blue] via a gate at over 13 meters per second.Leonard Bauersfeld
A human-piloted racing drone [red] chases an autonomous vision-based drone [blue] via a gate at over 13 meters per second.Leonard Bauersfeld
Fixing Drone Racing
By the Numbers: Autonomous Racing Drones
Body dimension:
215 millimeters
Weight:
870 grams
Most thrust:
35 newton meters (26 pound-feet)
Flight length:
2 minutes
Acceleration:
4.5 gs
Prime velocity:
130+ kilometers per hour
Onboard sensing:
Intel RealSense T265 monitoring digital camera
Onboard computing:
Nvidia Jetson TX2
“We’re attempting to make historical past,” says
Davide Scaramuzza, who leads the Robotics and Notion Group on the College of Zurich (UZH). “We wish to show that an AI-powered, vision-based drone can obtain human-level, and possibly even superhuman-level, efficiency in a drone race.” Utilizing imaginative and prescient is the important thing right here: Scaramuzza has been engaged on drones that sense the best way most individuals do, counting on cameras to understand the world round them and making choices based mostly totally on that visible information. That is what is going to make the race honest—human eyes and a human mind versus robotic eyes and a robotic mind, every competitor flying the identical racing quadrotors as quick as attainable across the identical course.
“Drone racing [against humans] is a perfect framework for evaluating the progress of autonomous vision-based robotics,” Scaramuzza explains. “And while you resolve drone racing, the functions go a lot additional as a result of this drawback could be generalized to different robotics functions, like inspection, supply, or search and rescue.”
Whereas there are already drones doing these duties, they have an inclination to fly slowly and thoroughly. Based on Scaramuzza, having the ability to fly sooner could make drones extra environment friendly, enhancing their flight length and vary and thus their utility. “If you need drones to switch people at uninteresting, troublesome, or harmful duties, the drones must do issues sooner or extra effectively than people. That’s what we’re working towards—that’s our ambition,” Scaramuzza explains. “There are a lot of arduous challenges in robotics. Quick, agile, autonomous flight is one in all them.”
Autonomous Navigation
Scaramuzza’s autonomous-drone system, referred to as Swift, begins with a three-dimensional map of the course. The human pilots have entry to this map as effectively, in order that they’ll follow in simulation. The objective of each human and robot-drone pilots is to fly via every gate as shortly as attainable, and one of the simplest ways of doing that is by way of what’s referred to as a time-optimal trajectory.
Robots have a bonus right here as a result of it’s attainable (in simulation) to calculate this trajectory for a given course in a approach that’s provably optimum. However figuring out the optimum trajectory will get you solely to this point. Scaramuzza explains that simulations are by no means utterly correct, and issues which are particularly arduous to mannequin—together with the turbulent aerodynamics of a drone flying via a gate and the pliability of the drone itself—make it troublesome to stay to that optimum trajectory.

 Whereas the human-piloted drones [red] are every outfitted with an FPV digital camera, every of the autonomous drones [blue] has an Intel RealSense imaginative and prescient system powered by a Nvidia Jetson TX2 onboard laptop. Each units of drones are additionally outfitted with reflective markers which are tracked by an exterior digital camera system. Evan Ackerman
Whereas the human-piloted drones [red] are every outfitted with an FPV digital camera, every of the autonomous drones [blue] has an Intel RealSense imaginative and prescient system powered by a Nvidia Jetson TX2 onboard laptop. Each units of drones are additionally outfitted with reflective markers which are tracked by an exterior digital camera system. Evan Ackerman
The answer, says Scaramuzza, is to make use of deep-reinforcement studying. You’re nonetheless coaching your system in simulation, however you’re additionally tasking your reinforcement-learning algorithm with making steady changes, tuning the system to a selected monitor in a real-world surroundings. Some real-world information is collected on the monitor and added to the simulation, permitting the algorithm to include realistically “noisy” information to higher put together it for flying the precise course. The drone won’t ever fly probably the most mathematically optimum trajectory this fashion, however it should fly a lot sooner than it could utilizing a trajectory designed in a wholly simulated surroundings.
From there, the one factor that is still is to find out how far to push Swift. One of many lead researchers,
Elia Kaufmann, quotes Mario Andretti: “If all the things appears underneath management, you’re simply not going quick sufficient.” Discovering that fringe of management is the one approach the autonomous vision-based quadrotors will be capable of fly sooner than these managed by people. “If we had a profitable run, we simply cranked up the velocity once more,” Kaufmann says. “And we’d preserve doing that till we crashed. Fairly often, our circumstances for going residence on the finish of the day are both all the things has labored, which by no means occurs, or that each one the drones are damaged.”

Evan Ackerman
 Though the autonomous vision-based drones have been quick, they have been additionally much less sturdy. Even small errors might result in crashes from which the autonomous drones couldn’t get well.Regina Sablotny
Though the autonomous vision-based drones have been quick, they have been additionally much less sturdy. Even small errors might result in crashes from which the autonomous drones couldn’t get well.Regina Sablotny
How the Robots Fly
As soon as Swift has decided its desired trajectory, it must navigate the drone alongside that trajectory. Whether or not you’re flying a drone or driving a automobile, navigation entails two basic issues: figuring out the place you might be and figuring out how one can get the place you wish to go. The autonomous drones have calculated the time-optimal route prematurely, however to fly that route, they want a dependable technique to decide their very own location in addition to their velocity and orientation.
To that finish, the quadrotor makes use of an Intel RealSense imaginative and prescient system to establish the corners of the racing gates and different visible options to localize itself on the course. An Nvidia Jetson TX2 module, which features a GPU, a CPU, and related {hardware}, manages all the picture processing and management on board.
Utilizing solely imaginative and prescient imposes vital constraints on how the drone flies. For instance, whereas quadrotors are equally able to flying in any course, Swift’s digital camera must level ahead more often than not. There’s additionally the problem of movement blur, which happens when the publicity size of a single body within the drone’s digital camera feed is lengthy sufficient that the drone’s personal movement over that point turns into vital. Movement blur is very problematic when the drone is popping: The excessive angular velocity leads to blurring that primarily renders the drone blind. The roboticists must plan their flight paths to reduce movement blur, discovering a compromise between a time-optimal flight path and one which the drone can fly with out crashing.
 Davide Scaramuzza [far left], Elia Kaufmann [far right] and different roboticists from the College of Zurich watch a detailed race.Regina Sablotny
Davide Scaramuzza [far left], Elia Kaufmann [far right] and different roboticists from the College of Zurich watch a detailed race.Regina Sablotny
How the People Fly
For the human pilots, the challenges are comparable. The quadrotors are able to much better efficiency than pilots usually benefit from. Bitmatta estimates that he flies his drone at about 60 % of its most efficiency. However the greatest limiting issue for the human pilots is the video feed.
Folks race drones in what’s referred to as first-person view (FPV), utilizing video goggles that show a real-time feed from a digital camera mounted on the entrance of the drone. The FPV video techniques that the pilots utilized in Zurich can transmit at 60 interlaced frames per second in comparatively poor analog VGA high quality. In simulation, drone pilots follow in HD at over 200 frames per second, which makes a considerable distinction. “Among the choices that we make are based mostly on simply 4 frames of knowledge,” explains Bitmatta. “Greater-quality video, with higher body charges and decrease latency, would give us much more information to make use of.” Nonetheless, one of many issues that impresses the roboticists probably the most is simply how effectively individuals carry out with the video high quality accessible. It means that these pilots develop the power to carry out the equal of the robotic’s localization and state-estimation algorithms.
It appears as if the human pilots are additionally trying to calculate a time-optimal trajectory, Scaramuzza says. “Some pilots have advised us that they attempt to think about an imaginary line via a course, after a number of hours of rehearsal. So we speculate that they’re really constructing a psychological map of the surroundings, and studying to compute an optimum trajectory to observe. It’s very attention-grabbing—it appears that evidently each the people and the machines are reasoning in the identical approach.”
However in his effort to fly sooner, Bitmatta tries to keep away from following a predefined trajectory. “With predictive flying, I’m attempting to fly to the plan that I’ve in my head. With reactive flying, I’m what’s in entrance of me and consistently reacting to my surroundings.” Predictive flying could be quick in a managed surroundings, but when something unpredictable occurs, or if Bitmatta has even a quick lapse in focus, the drone could have traveled tens of meters earlier than he can react. “Flying reactively from the beginning might help you to get well from the surprising,” he says.
Will People Have an Edge?
“Human pilots are rather more capable of generalize, to make choices on the fly, and to study from experiences than are the autonomous techniques that we at the moment have,” explains
Christian Pfeiffer, a neuroscientist turned roboticist at UZH who research how human drone pilots do what they do. “People have tailored to plan into the long run—robots don’t have that long-term imaginative and prescient. I see that as one of many predominant variations between people and autonomous techniques proper now.”
Scaramuzza agrees. “People have rather more expertise, accrued via years of interacting with the world,” he says. “Their data is a lot broader as a result of they’ve been educated throughout many alternative conditions. In the intervening time, the issue that we face within the robotics group is that we all the time want to coach an algorithm for every particular activity. People are nonetheless higher than any machine as a result of people could make higher choices in very complicated conditions and within the presence of imperfect information.”
“I feel there’s loads that we as people can study from how these robots fly.” —Thomas Bimatta
This understanding that people are nonetheless much better generalists has positioned some vital constraints on the race. The “equity” is closely biased in favor of the robots in that the race, whereas designed to be as equal as attainable, is going down in the one surroundings wherein Swift is more likely to have an opportunity. The roboticists have achieved their finest to reduce unpredictability—there’s no wind within the hangar, for instance, and the illumination is tightly managed. “We’re utilizing state-of-the-art notion algorithms,” Scaramuzza explains, “however even the most effective algorithms nonetheless have lots of failure modes due to illumination adjustments.”
To make sure constant lighting, virtually all the information for Swift’s coaching was collected at evening, says Kaufmann. “The great factor about evening is that you could management the illumination; you’ll be able to change on the lights and you’ve got the identical circumstances each time. If you happen to fly within the morning, when the daylight is getting into the hangar, all that backlight makes it troublesome for the digital camera to see the gates. We will deal with these circumstances, however we’ve got to fly at slower speeds. After we push the system to its absolute limits, we sacrifice robustness.”
Race Day
The race begins on a Saturday morning. Daylight streams via the hangar’s skylights and open doorways, and because the human pilots and autonomous drones begin to fly check laps across the monitor, it’s instantly apparent that the vision-based drones are usually not performing in addition to they did the evening earlier than. They’re recurrently clipping the perimeters of the gates and spinning uncontrolled, a telltale signal that the vision-based state estimation is being thrown off. The roboticists appear annoyed. The human pilots appear cautiously optimistic.
The winner of the competitors will fly the three quickest consecutive laps with out crashing. The people and the robots pursue that objective in primarily the identical approach, by adjusting the parameters of their flight to search out the purpose at which they’re barely in management. Quadrotors tumble into gates, partitions, flooring, and ceilings, because the racers push their limits. It is a regular a part of drone racing, and there are dozens of substitute drones and employees to repair them once they break.
 Skilled drone pilot Thomas Bitmatta [left] examines flight paths recorded by the exterior monitoring system. The human pilots felt they might fly higher by finding out the robots.Evan Ackerman
Skilled drone pilot Thomas Bitmatta [left] examines flight paths recorded by the exterior monitoring system. The human pilots felt they might fly higher by finding out the robots.Evan Ackerman
There shall be a number of completely different metrics by which to determine whether or not the people or the robots are sooner. The exterior localization system used to actively management the autonomous drone final evening is getting used as we speak for passive monitoring, recording occasions for every phase of the course, every lap of the course, and for every three-lap multidrone race.
Because the human pilots get comfy with the course, their lap occasions lower. Ten seconds per lap. Then 8 seconds. Then 6.5 seconds. Hidden behind their FPV headsets, the pilots are concentrating intensely as their shrieking quadrotors whirl via the gates. Swift, in the meantime, is rather more constant, usually clocking lap occasions under 6 seconds however incessantly unable to finish three consecutive laps with out crashing. Seeing Swift’s lap occasions, the human pilots push themselves, and their lap occasions lower additional. It’s going to be very shut.
Zurich Drone Racing: AI vs Humanhttps://rpg.ifi.uzh.ch/
The pinnacle-to-head races begin, with Swift and a human pilot launching side-by-side on the sound of the beginning horn. The human is straight away at an obstacle, as a result of an individual’s response time is sluggish in comparison with that of a robotic: Swift can launch in lower than 100 milliseconds, whereas a human takes about 220 ms to listen to a noise and react to it.
 UZH’s Elia Kaufmann prepares an autonomous vision-based drone for a race. Since touchdown gear would solely sluggish racing drones down, they take off from stands, which permits them to launch immediately towards the primary gate.Evan Ackerman
UZH’s Elia Kaufmann prepares an autonomous vision-based drone for a race. Since touchdown gear would solely sluggish racing drones down, they take off from stands, which permits them to launch immediately towards the primary gate.Evan Ackerman
On the course, the human pilots can
virtually sustain with Swift: The robotic’s finest three-lap time is 17.465 seconds, whereas Bitmatta’s is eighteen.746 seconds and Vanover manages 17.956 seconds. However in 9 head-to-head races with Swift, Vanover wins 4, and in seven races, Bitmatta wins three. That’s as a result of Swift doesn’t end nearly all of the time, colliding both with a gate or with its opponent. The human pilots can get well from collisions, even relaunching from the bottom if obligatory. Swift doesn’t have these abilities. The robotic is sooner, nevertheless it’s additionally much less sturdy.
Zurich Drone Racing: Onboard Viewhttps://rpg.ifi.uzh.ch/
Getting Even Sooner
 Thomas Bitmatta, two-time MultiGP Worldwide Open World Cup champion, pilots his drone via the course in FPV (first-person view).Regina Sablotny
Thomas Bitmatta, two-time MultiGP Worldwide Open World Cup champion, pilots his drone via the course in FPV (first-person view).Regina Sablotny
 In drone racing, crashing is a part of the method. Each Swift and the human pilots crashed dozens of drones, which have been consistently being repaired.Regina Sablotny
In drone racing, crashing is a part of the method. Each Swift and the human pilots crashed dozens of drones, which have been consistently being repaired.Regina Sablotny
“Absolutely the efficiency of the robotic—when it’s working, it’s sensible,” says Bitmatta, once I communicate to him on the finish of race day. “It’s just a little additional forward of us than I assumed it could be. It’s nonetheless achievable for people to match it, however the good factor for us in the intervening time is that it doesn’t seem like it’s very adaptable.”
UZH’s Kaufmann doesn’t disagree. “Earlier than the race, we had assumed that consistency was going to be our energy. It turned out to not be.” Making the drone extra sturdy in order that it may possibly adapt to completely different lighting circumstances, Kaufmann provides, is generally a matter of accumulating extra information. “We will tackle this by retraining the notion system, and I’m positive we are able to considerably enhance.”Kaufmann believes that underneath managed circumstances, the potential efficiency of the autonomous vision-based drones is already effectively past what the human pilots are able to. Even when this wasn’t conclusively proved via the competitors, bringing the human pilots to Zurich and accumulating information about how they fly made Kaufmann much more assured in what Swift can do. “We had overestimated the human pilots,” he says. “We have been measuring their efficiency as they have been coaching, and we slowed down a bit to extend our success fee, as a result of we had seen that we might fly slower and nonetheless win. Our quickest methods speed up the quadrotor at 4.5
gs, however we noticed that if we speed up at solely 3.8 gs, we are able to nonetheless obtain a protected win.”
Bitmatta feels that the people have much more potential, too. “The form of flying we have been doing final yr was nothing in contrast with what we’re doing now. Our fee of progress is absolutely quick. And I feel there’s loads that we as people can study from how these robots fly.”
Helpful Flying Robots
So far as Scaramuzza is conscious, the occasion in Zurich, which was held final summer season, was the primary time {that a} totally autonomous cellular robotic achieved world-champion efficiency in a real-world aggressive sport. However, he factors out, “that is nonetheless a analysis experiment. It’s not a product. We’re very removed from making one thing that may work in any surroundings and any situation.”
Apart from making the drones extra adaptable to completely different lighting circumstances, the roboticists are instructing Swift to generalize from a recognized course to a brand new one, as people do, and to soundly fly round different drones. All of those abilities are transferable and can ultimately result in sensible functions. “Drone racing is pushing an autonomous system to its absolute limits,” roboticist Christian Pfeiffer says. “It’s not the final word objective—it’s a stepping-stone towards constructing higher and extra succesful autonomous robots.” When a type of robots flies via your window and drops off a package deal in your espresso desk earlier than zipping proper out once more, these researchers could have earned your thanks.
Scaramuzza is assured that his drones will sooner or later be the champions of the air—not simply inside a rigorously managed hangar in Zurich however wherever they are often helpful to humanity. “I feel in the end, a machine shall be higher than any human pilot, particularly when consistency and precision are vital,” he says. “I don’t suppose that is controversial. The query is, when? I don’t suppose it should occur within the subsequent few a long time. In the intervening time, people are significantly better with dangerous information. However that is only a notion drawback, and laptop imaginative and prescient is making big steps ahead. Ultimately, robotics received’t simply meet up with people, it should outperform them.”
In the meantime, the human pilots are taking this in stride. “Seeing individuals use racing as a approach of studying—I recognize that,” Bitmatta says. “A part of me is a racer who doesn’t need something to be sooner than I’m. And a part of me is absolutely excited for the place this know-how can lead. The chances are infinite, and that is the beginning of one thing that might change the entire world.”
This text seems within the September 2023 print challenge as “Superhuman Velocity: AI Drones for the Win.”
From Your Web site Articles
Associated Articles Across the Internet