

{kind=link}
Empowering end-users to interactively educate robots to carry out novel duties is a vital functionality for his or her profitable integration into real-world functions. For instance, a person might need to educate a robotic canine to carry out a brand new trick, or educate a manipulator robotic how you can set up a lunch field based mostly on person preferences. The current developments in giant language fashions (LLMs) pre-trained on in depth web information have proven a promising path in the direction of reaching this purpose. Certainly, researchers have explored various methods of leveraging LLMs for robotics, from step-by-step planning and goal-oriented dialogue to robot-code-writing brokers.
Whereas these strategies impart new modes of compositional generalization, they deal with utilizing language to hyperlink collectively new behaviors from an current library of management primitives which are both manually engineered or realized a priori. Regardless of having inner information about robotic motions, LLMs wrestle to instantly output low-level robotic instructions as a result of restricted availability of related coaching information. Consequently, the expression of those strategies are bottlenecked by the breadth of the accessible primitives, the design of which frequently requires in depth professional information or large information assortment.
In “Language to Rewards for Robotic Talent Synthesis”, we suggest an strategy to allow customers to show robots novel actions by pure language enter. To take action, we leverage reward capabilities as an interface that bridges the hole between language and low-level robotic actions. We posit that reward capabilities present a really perfect interface for such duties given their richness in semantics, modularity, and interpretability. Additionally they present a direct connection to low-level insurance policies by black-box optimization or reinforcement studying (RL). We developed a language-to-reward system that leverages LLMs to translate pure language person directions into reward-specifying code after which applies MuJoCo MPC to seek out optimum low-level robotic actions that maximize the generated reward perform. We reveal our language-to-reward system on quite a lot of robotic management duties in simulation utilizing a quadruped robotic and a dexterous manipulator robotic. We additional validate our methodology on a bodily robotic manipulator.
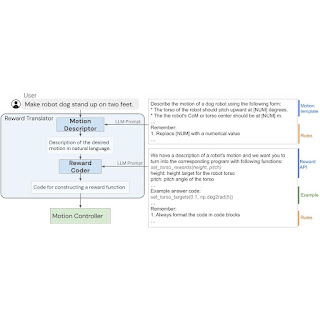
The language-to-reward system consists of two core parts: (1) a Reward Translator, and (2) a Movement Controller. The Reward Translator maps pure language instruction from customers to reward capabilities represented as python code. The Movement Controller optimizes the given reward perform utilizing receding horizon optimization to seek out the optimum low-level robotic actions, corresponding to the quantity of torque that needs to be utilized to every robotic motor.
 |
| LLMs can not instantly generate low-level robotic actions attributable to lack of information in pre-training dataset. We suggest to make use of reward capabilities to bridge the hole between language and low-level robotic actions, and allow novel complicated robotic motions from pure language directions. |
Reward Translator: Translating person directions to reward capabilities
The Reward Translator module was constructed with the purpose of mapping pure language person directions to reward capabilities. Reward tuning is very domain-specific and requires professional information, so it was not shocking to us after we discovered that LLMs educated on generic language datasets are unable to instantly generate a reward perform for a particular {hardware}. To handle this, we apply the in-context studying means of LLMs. Moreover, we cut up the Reward Translator into two sub-modules: Movement Descriptor and Reward Coder.
Movement Descriptor
First, we design a Movement Descriptor that interprets enter from a person and expands it right into a pure language description of the specified robotic movement following a predefined template. This Movement Descriptor turns doubtlessly ambiguous or imprecise person directions into extra particular and descriptive robotic motions, making the reward coding activity extra steady. Furthermore, customers work together with the system by the movement description discipline, so this additionally supplies a extra interpretable interface for customers in comparison with instantly displaying the reward perform.
To create the Movement Descriptor, we use an LLM to translate the person enter into an in depth description of the specified robotic movement. We design prompts that information the LLMs to output the movement description with the correct quantity of particulars and format. By translating a imprecise person instruction right into a extra detailed description, we’re capable of extra reliably generate the reward perform with our system. This concept may also be doubtlessly utilized extra typically past robotics duties, and is related to Inside-Monologue and chain-of-thought prompting.
Reward Coder
Within the second stage, we use the identical LLM from Movement Descriptor for Reward Coder, which interprets generated movement description into the reward perform. Reward capabilities are represented utilizing python code to learn from the LLMs’ information of reward, coding, and code construction.
Ideally, we wish to use an LLM to instantly generate a reward perform R (s, t) that maps the robotic state s and time t right into a scalar reward worth. Nonetheless, producing the proper reward perform from scratch remains to be a difficult drawback for LLMs and correcting the errors requires the person to know the generated code to supply the precise suggestions. As such, we pre-define a set of reward phrases which are generally used for the robotic of curiosity and permit LLMs to composite completely different reward phrases to formulate the ultimate reward perform. To realize this, we design a immediate that specifies the reward phrases and information the LLM to generate the proper reward perform for the duty.
 |
| The inner construction of the Reward Translator, which is tasked to map person inputs to reward capabilities. |
Movement Controller: Translating reward capabilities to robotic actions
The Movement Controller takes the reward perform generated by the Reward Translator and synthesizes a controller that maps robotic remark to low-level robotic actions. To do that, we formulate the controller synthesis drawback as a Markov choice course of (MDP), which may be solved utilizing completely different methods, together with RL, offline trajectory optimization, or mannequin predictive management (MPC). Particularly, we use an open-source implementation based mostly on the MuJoCo MPC (MJPC).
MJPC has demonstrated the interactive creation of various behaviors, corresponding to legged locomotion, greedy, and finger-gaiting, whereas supporting a number of planning algorithms, corresponding to iterative linear–quadratic–Gaussian (iLQG) and predictive sampling. Extra importantly, the frequent re-planning in MJPC empowers its robustness to uncertainties within the system and permits an interactive movement synthesis and correction system when mixed with LLMs.
Examples
Robotic canine
Within the first instance, we apply the language-to-reward system to a simulated quadruped robotic and educate it to carry out varied expertise. For every ability, the person will present a concise instruction to the system, which is able to then synthesize the robotic movement through the use of reward capabilities as an intermediate interface.
Dexterous manipulator
We then apply the language-to-reward system to a dexterous manipulator robotic to carry out quite a lot of manipulation duties. The dexterous manipulator has 27 levels of freedom, which may be very difficult to manage. Many of those duties require manipulation expertise past greedy, making it troublesome for pre-designed primitives to work. We additionally embody an instance the place the person can interactively instruct the robotic to position an apple inside a drawer.
Validation on actual robots
We additionally validate the language-to-reward methodology utilizing a real-world manipulation robotic to carry out duties corresponding to selecting up objects and opening a drawer. To carry out the optimization in Movement Controller, we use AprilTag, a fiducial marker system, and F-VLM, an open-vocabulary object detection instrument, to determine the place of the desk and objects being manipulated.
Conclusion
On this work, we describe a brand new paradigm for interfacing an LLM with a robotic by reward capabilities, powered by a low-level mannequin predictive management instrument, MuJoCo MPC. Utilizing reward capabilities because the interface permits LLMs to work in a semantic-rich area that performs to the strengths of LLMs, whereas making certain the expressiveness of the ensuing controller. To additional enhance the efficiency of the system, we suggest to make use of a structured movement description template to higher extract inner information about robotic motions from LLMs. We reveal our proposed system on two simulated robotic platforms and one actual robotic for each locomotion and manipulation duties.
Acknowledgements
We wish to thank our co-authors Nimrod Gileadi, Chuyuan Fu, Sean Kirmani, Kuang-Huei Lee, Montse Gonzalez Arenas, Hao-Tien Lewis Chiang, Tom Erez, Leonard Hasenclever, Brian Ichter, Ted Xiao, Peng Xu, Andy Zeng, Tingnan Zhang, Nicolas Heess, Dorsa Sadigh, Jie Tan, and Yuval Tassa for his or her assist and help in varied points of the undertaking. We might additionally prefer to acknowledge Ken Caluwaerts, Kristian Hartikainen, Steven Bohez, Carolina Parada, Marc Toussaint, and the better groups at Google DeepMind for his or her suggestions and contributions.