
Drones, often known as unmanned aerial autos (UAVs), have unlocked new potentialities in lots of industries by offering versatile platforms for duties corresponding to surveillance, mapping, supply, and catastrophe response. One of many key capabilities that permit drones to carry out these duties autonomously is their potential to navigate with out fixed human intervention. Autonomous navigation entails the drone’s capability to find out its place, plan a path, and regulate its trajectory primarily based on real-time knowledge, all with out direct human management. That is completed via a mix of cutting-edge applied sciences, with GPS receivers taking part in a crucial function.

GPS receivers talk with a constellation of satellites orbiting the Earth, offering exact timing and placement data to the UAV. By triangulating indicators from a number of satellites, the GPS receiver can decide the UAV’s place precisely. This data is then utilized by the UAV’s onboard pc to calculate its trajectory, velocity, and route, permitting it to observe a predetermined flight path or reply to dynamic environmental modifications.
Nevertheless, regardless of their widespread use and effectiveness, GPS indicators can generally be unreliable or unavailable. Numerous challenges can come up that have an effect on GPS indicators, corresponding to sign interference, city canyons (tall buildings obstructing the indicators), and opposed atmospheric situations. When a UAV loses GPS sign, it might face difficulties in sustaining its supposed course.
In circumstances the place GPS indicators are misplaced, alternate strategies have to be employed for a UAV to find out its place. Imaginative and prescient-based management techniques are often utilized in these circumstances, which use cameras and picture processing algorithms to collect details about the atmosphere that the drone finds itself in. One approach specifically, known as visible servoing, which permits for exact relative positioning of a UAV with respect to an object of curiosity, was focused for some enhancements by researchers led by a gaggle at Fuzhou College in China.
Monitoring targets through visible servoing is a low-cost answer for quite a lot of UAV management duties. By focusing particularly on image-based visible servoing, by which pose reconstructions are usually not required, the researchers had been additionally in a position to remove the necessity for energy hungry computational {hardware}, because the algorithms are comparatively light-weight. Nevertheless, any noise that enters image-based visible servoing calculations is thought to negatively impression the accuracy of translational velocity measurements — and the accuracy of those measurements is critically vital for the correct functioning of the flight controller.
Another recognized issues exist with this visible servoing approach. For instance, when the goal object is rotating, it makes picture depth estimation very difficult. Furthermore, UAVs typically expertise a lot of disturbances whereas in flight that come up from unpredictable, exterior sources — these have to be handled for correct goal monitoring.
To deal with these challenges, the group proposed a lot of enhancements to enhance the accuracy of image-based visible servoing. A velocity observer was developed to estimate the relative velocities between the UAV and the goal. This observer eradicated the necessity for translational velocity measurements, thereby sidestepping the management issues attributable to noise in these measurements.
A novel picture depth mannequin was additionally developed, which allows the system to trace objects in any arbitrary orientation. This allows correct object monitoring and the calculation of easy trajectories even when the goal is rotating. Unpredictable disturbances had been additionally accounted for via the introduction of an integral-based filter that enhances monitoring stability.
The Lyapunov methodology, which is used to evaluate the soundness of nonlinear techniques, was leveraged to research the soundness of this tradition image-based visible servoing controller. When monitoring a dynamic, rotating goal, these experiments demonstrated the monitoring stability and robustness of the controller, in addition to its potential to function acceptably within the presence of surprising disturbances.
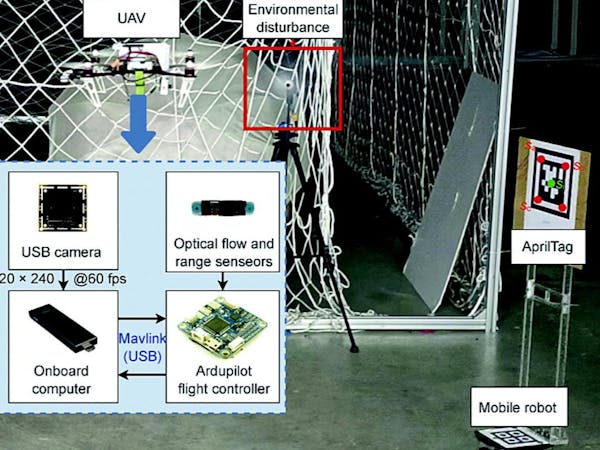
Shifting ahead, the group plans to refine their strategies and apply them to sensible, real-world eventualities involving capturing dynamic targets and making autonomous landings.Experimental setup for testing the UAV management system (📷: Y. Chen et al.)
Structure of the system (📷: Y. Chen et al.)
A simulated atmosphere was used to check efficiency (📷: Y. Chen et al.)